



















































● 高精度
● 免维护
● 即插即用
● 长达 10 年的内部数据存储
● 测量频率 10 Hz
● 0 – 60m 波高
● 网络连接
新特性
● 改进升沉补偿
● 提高了纵摇和横摇的精度

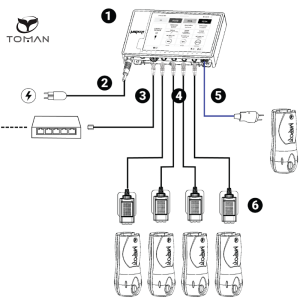
1500系列MF释放信标是长期环境和海洋观测的理想选择。通过3510 PAM、Easytrak Nexus或Easytrak Pyxis操作,信标结合了扩频技术,增加了“上行”的可靠性。


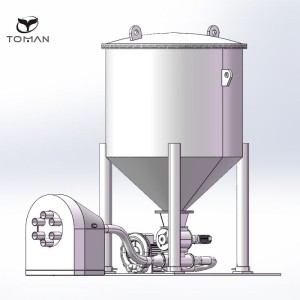
Binsfeld Shaft Power Explorer 系统,适配于 Binsfeld TPM2 轴功率测量仪。可以实时接收,读取,显示和存储来自 TPM2 轴功率仪的轴扭矩、转速、功率和 TPM2 工作状态,及 GPS 航速信息。


网板传感器系列包含两种传感器类型:扩张传感器和网板测深仪。扩张传感器是安装在左右网板和中间的网簇上,可以监测网板的扩张。传感器之间通过声学链路进行相互通讯。主传感器安装在左网板上,先和右网板和中间网簇通讯然后发送距离数据到船上。传感器也可以监测纵摇和横摇姿态,水温和深度。提供每个网板的姿态模型。例如,你可以了解是否网板中的一个在拖网过程中掉落了或者网板之间是否交叉缠绕了。扩张传感器可以安装在所有类型的拖网上用作网板传感器。扩张传感器也有小尺寸的,可以满足小网板的安装需求:迷你型的扩张传感器。网板测深仪传感器可以显示一个回波图像并且通过Marport的窄波带协议和船上通讯。网板测深仪传感器都可以安装在网板上。可以确认网板和海底之间是否有个稳定的距离。最新版本的网板测深仪带有目标强度校准:传感器被校准为一个相同的目标显示为相同的颜色。

Marport的渔获传感器告诉了用户什么时候网囊内的渔获是满的。安装在网囊的上面,监测网具内已经有的渔获量并且当网囊内被填充满后提醒您。用户甚至可以使用渔获传感器探测到网囊内的精确的渔获量。通过渔获传感器,您可以监测正在捕捞的网囊内的数量,避免过度填充并且提高网囊内的渔获生存率。推荐根据网具逐渐填充的过程,沿着网囊安装几个传感器。
格栅和速度传感器都是依赖于纵摇和横摇姿态传感器的,只不过他们所侧重的功能和目的不一样。格栅传感器安装在网具的格栅上,这可以让我们知道格栅是否工作:当目标鱼获进入网囊中时,是否选择性的让其逃出。格栅传感器监测格栅的角度和通过水流的速度。通过这些方式,了解格栅是否扭转或者关闭了,在丢失目标鱼获之前解决这些问题。速度传感器安装在网口上纲。测量来自两个方向的水流:经过拖网和正对着着网口方向的水流。可以让用户了解网具是否是正确的速度和受力方向。可以测量经过网具的速度为3Kt,对着网口的方向为6Kt。对称型传感器安装在网口上纲。用来测量网具的对水速度,用户可以知道网具是否和水流方向是垂直的。最后,速度探测器组合了网具速度传感器和网口探测器。安装在网口上纲或网囊的位置,可以测量对着网具的方向流速(最大10Kt)和经过网具的流速(最大3节),并且同时可以显示回波图像。这样,用户可以看到在水流影响下进入网具的鱼获和网口扩张的概况。同时设备也自带了纵摇,横摇姿态,深度和温度传感器数据。可以接收比其他的速度传感器更多的数据。速度传感器是兼容Scantrol软件的。
Scala是Marport高级的拖网监控系统,可收集,处理,存储和显示多个传感器,测深仪以及其他连接设备发送的数据。Scala可以让用户掌控捕捞操作。为了适应不同的工作状况,网具和接收的不同传感器数据类型,监测系统提供了非常高的灵活性。

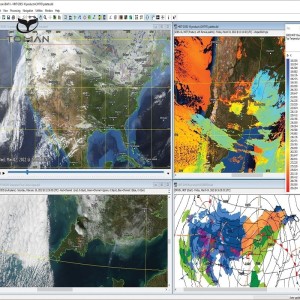
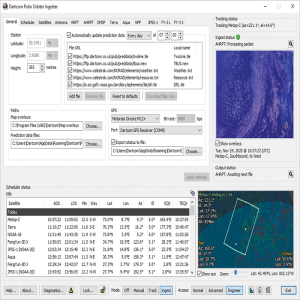
可靠的高性能陆基和船载遥感卫星接收系统,用于NOAA,Metop,FengYun-3,DMSP和JPSS卫星的HRPT,AHRPT,DMSP和LRD数据。

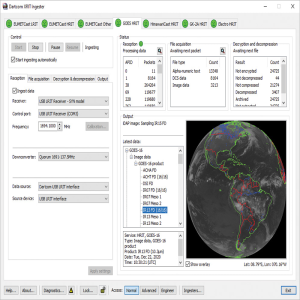
Dartcom LRIT / HRIT遥感卫星接收系统是个可靠,高性能的系统,用于接收和处理来自EUMETCast,HimawariCast,GOES,COMS-1和Electro服务的LRIT,HRIT和GVAR数据。

平价且高效的解决方案,用于接收和处理Terra/Aqua (MODIS)、Suomi-NPP、JPSS和风云 -3 (FY-3)卫星x波段数据, NOAA 18/19 HRPT、MetOp-A/B/C和FY-3B/C等L波段数据


可靠的高性能陆基和船载遥感卫星接收系统,用于NOAA,Metop,FengYun-3,DMSP和JPSS卫星的HRPT,AHRPT,DMSP和LRD数据。
Dartcom LRIT / HRIT遥感卫星接收系统是个可靠,高性能的系统,用于接收和处理来自EUMETCast,HimawariCast,GOES,COMS-1和Electro服务的LRIT,HRIT和GVAR数据。
平价且高效的解决方案,用于接收和处理Terra/Aqua (MODIS)、Suomi-NPP、JPSS和风云 -3 (FY-3)卫星x波段数据, NOAA 18/19 HRPT、MetOp-A/B/C和FY-3B/C等L波段数据





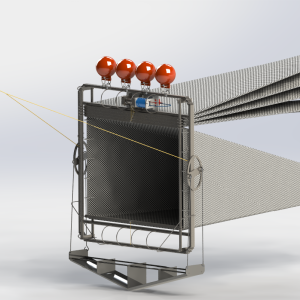
我们最新的带运动补偿的测波雷达!专为船载使用设计。它能准确地测量波高、波周期和吃水。不与水接触,免维护,无需(重新)校准,所以使用简单。
这种精确的波浪监测系统是一种易于使用、可靠且坚固的设备,用于测量船舶吃水、波浪高度和波浪周期。
本设备能够在恶劣的环境下保持高精度和可靠性,特别适用于海上浮动设施。
船载测波雷达,大部分安装在直升机甲板、船艏或桥楼,测量到水面距离。测量的距离根据雷达本身的升沉、纵摇和横摇进行补偿。因此,雷达单元包括一个高灵敏度的运动传感器。船载的测波雷达测量船只实际上承受的波浪。
雷达每秒10次测量到水面的距离。雷达本身能进行数据采集、数据处理、数据显示和远程服务。数据存储在设备内部,并通过网络分发。任何连接到(私有)网络的设备都可以访问基于web的用户界面。

测量波高、波周期和波向/精度高/功耗低/占用空间小/可记录长达20年的波浪数据/易于配置


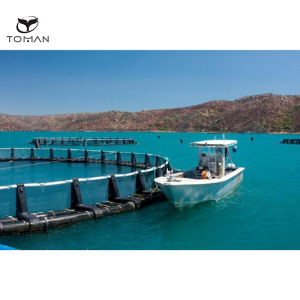
MIDAS WLR 专为在近海环境或传统岸基潮汐测量仪不实用的位置进行长期或短期部署而设计,可以在线或海床系泊。

自动同步多个测波杆的同步器。

一款可组成阵列的自容式水下压力传感器。

一款水下自容式压力传感器。

一款电缆连接,0-5V模拟信号/RS232或RS485输出&同步采样的超声波测波仪。

MIDAS WLR 专为在近海环境或传统岸基潮汐测量仪不实用的位置进行长期或短期部署而设计,可以在线或海床系泊。

Valeport miniTIDE 是一款小型潮汐记录仪,专为短期水下部署而设计,非常适合学术研究。

Sonic Wave Staff XB是一款同步采样的无线超声波测波仪。

Wave Staff XB是一款同步采样和自接地杆&同轴电缆杆的无线测波杆。

SM-050雷达波浪仪是一款精确的远程测量海洋表层方向波、表层流的测波设备
| 升沉 | 量程 | 2 – 75 m 到水面 |
| 精度 | ± 1 cm 1) | |
| 频率 | 10 Hz | |
| 吃水 | 精度 | ± 1 cm 2) 3) |
| 处理 | 平均10分钟(可选1分钟和5分钟 | |
| 间隔 | 1 分钟 | |
| 波高 | 量程 | 0 – 60 m |
| 精度 | ± 3 cm 3) | |
| 处理 | SWAP 4) (每数据块20分钟) | |
| 间隔 | 1分钟 | |
| 波周期 | 量程 | 1 – 100 s |
| 精度 | ± 50 ms 3) | |
| 处理 | SWAP 4) (每数据块20分钟) | |
| 间隔 | 1分钟 | |
| 限制 | 最大横摇 | 15° |
| 最大纵摇 | 15° |
| 机械 | 尺寸 | Ø 265 x 245 mm |
| 重量 | 12.5 kg | |
| 材质 | 不锈钢, AISI 316L | |
| 电气 | 供电 | 24 – 65 VDC, 65 – 240 Vac, 12W(14w峰值) |
| 频率 | 10 GHz (X波段) | |
| 调制 | 三角形 ,FMCW(调频连续波) | |
| 辐射 | 最大0.1 mW (远低于人体可承受限度) | |
| 环境 | 温度 | -40ºC到45 ºC |
| 湿度 | 0 – 100 % | |
| 防护等级 | IP67 | |
| 运动传感器 | 量程 | ± 4 g |
| 纵摇&横摇 | 0.02度 | |
| 通信 | 网络 | 1x 以太网 |
| 存储 | SD 32 Gb | |
| 可选 | 外部转换器到 RS232 或 RS422 或 RS485 |
1) 适用于静止水面.
2) 适用于有波浪的水面.
3) 波浪参数的精度不因雷达传感器性能而被限制,它是由海面测量的随机性所引起的。
4) SWAP是标准波分析程序,根据荷兰基础设施与环境部和国际油气生产商协会的应用标准。
5) 波浪周期没有用水平运动来补偿。因此,对于移动的船只,传感器测量的波周期是相对于船只的波周期。